すしルート#3で「すし×うごく」ネタで登壇してきました
すしルート#3で「すし×うごく」ネタで登壇してきました。
ネタ
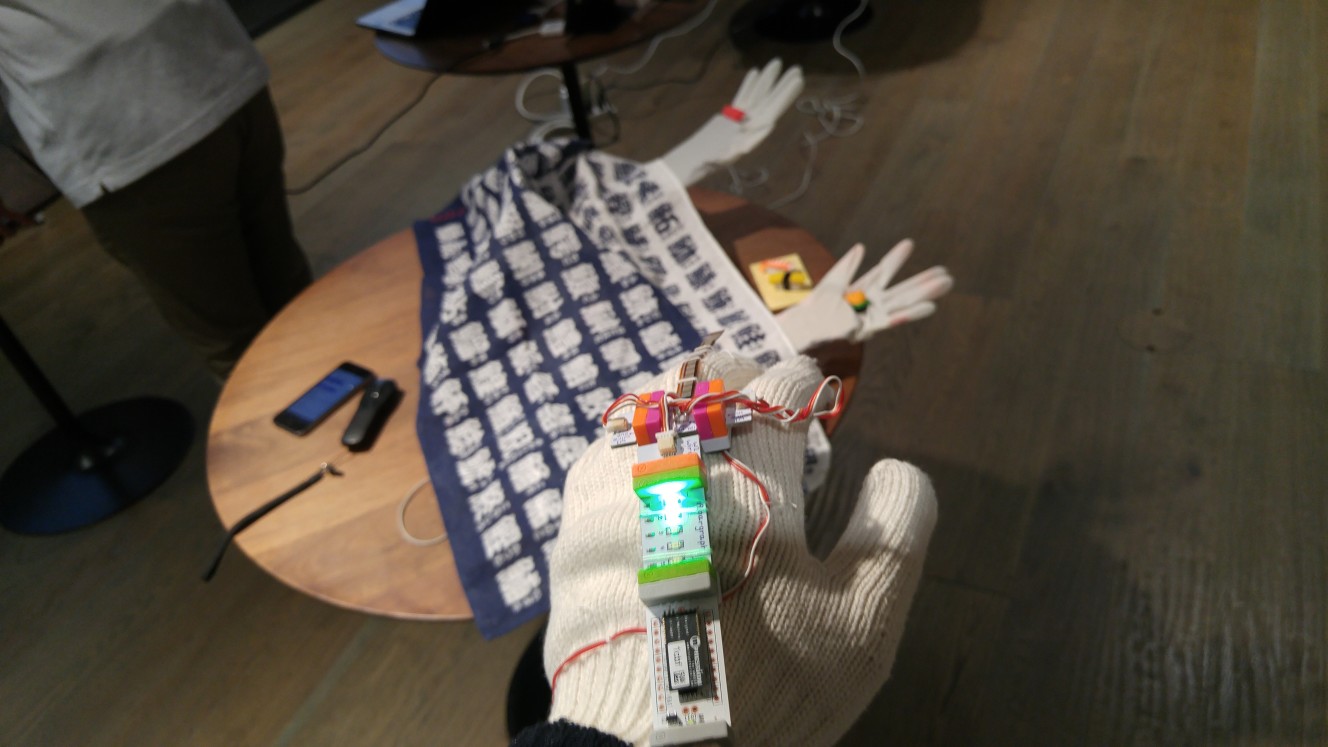
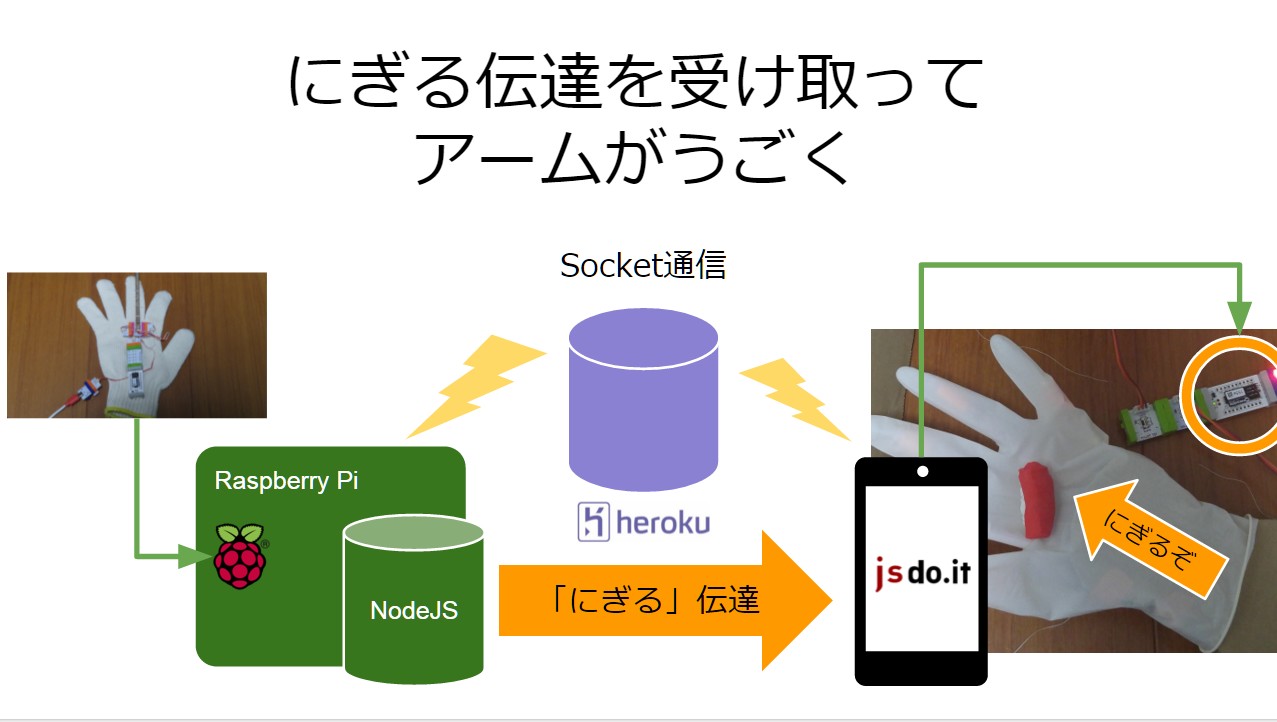
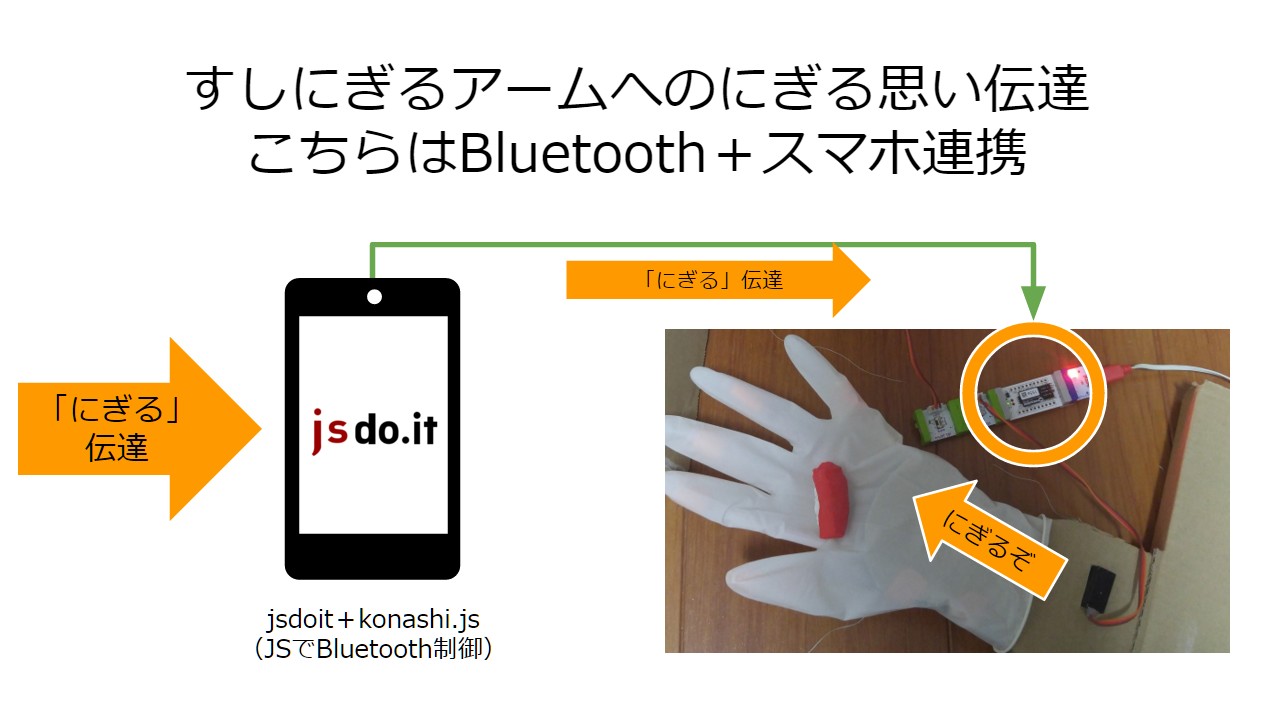
「すし×うごく」ネタということで、今回は「すしへうごく」というコンセプトで、すしにぎりたいグローブからすしにぎるアームに「にぎる」思いが伝わるデモをしつつ、KoshianBitとkonashi.jsとBluetooth連携をしてまいりました。
スライド
もろもろ裏話
当日はあいにくの雨でしてデバイス運搬には、ナカナカの大変さがありましたが、
今日はゴロゴロさせるタイヤ付きのキャリーケースでネタを持って向かう予定 #sushiruit
— 1ft_seabass (@1ft_seabass) 2016年3月14日
キャリーケース最高でした。つよい。
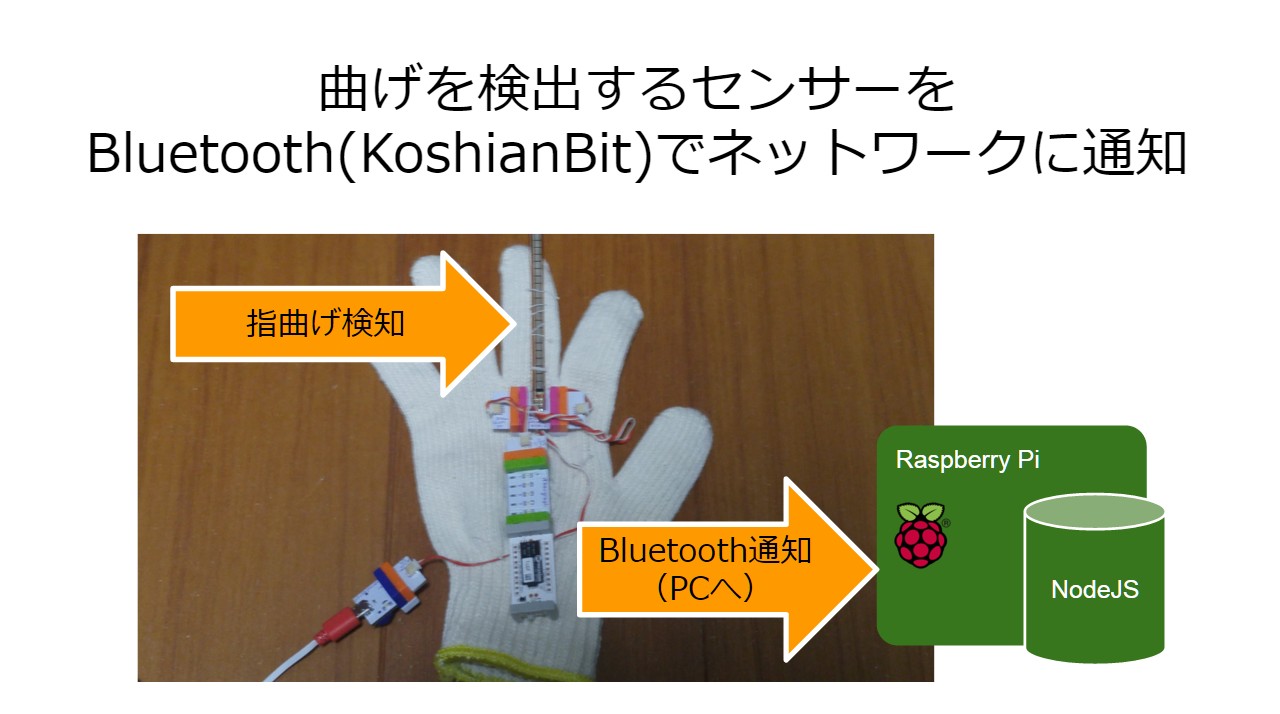
技術的には、ようやくここまできたなーということで、まず念願の曲げセンサーで手の動きを取得しBluetoothで送りました。
そして、koshian.jsでロボットアーム的な要素を絡めつつ作った工作とlittleBitsのサーボを絡めて受け取るように設計しました。
動画ではこんな感じです。
まず、まぐろ担当アーム単体。
そして、今回は安全策として2台作っていたのですが、当日も幸いにも両方動いたのでこんな感じでダブルで動きました。
威圧感ある。きもかわいさある。
littleBitsを絡めることでLEDを光らせることから発展してサーボに切り替えての動きを起こすことの楽しさと、KoshianBitによる無線化することによる楽しさを伝えることが出来たなーと思っています。
Bluetoothにすることでネットワークの中継地(RaspberryPiやkonashi.jsスマホ)は別途必要になるのですが、コンパクトになるのが良いですね。
そのほかにいろいろ気をつけたところや気付きとしては
- 手袋の固定はちゃんと縫い付けるようにした
- アームでのサーボ固定はなるべくキッチリにしないと糸の引張りを支えきれない
- ストローアームは手順通りつくると糸を通してからサーボにつけるが、緩みが生じやすいので、サーボにしっかり結いつけてから指先の糸固定を行ったほうがしっかり張る
- konashi.jsが1台のみのKoshian操作なので、RaspberryPiでもう1台は連携するようにして、やり取りできるようにした。
- Herokuで作った1ft-seabass/heroku-ifttt-maker-channel-socketio: heroku-ifttt-maker-channel-socketio大活躍、いい基礎にでき、すばやく製作できた
- 動力はそんなに強くないので、なるべく軽めのラバー手袋を選定した。布軍手はかなり重い(雰囲気出るけど)
- 本来は下に向けてにぎる方式だったが、影になるし、面白みがかけるので、上向きにしてみてよかった。
- なんというかBluetoothは切断されにくくて信頼感ある(KoshianBitの性能?)
- スマホとすぐ連携できるっていうのがBluetoothは身近な感じでいいですね
- うまく伝わっているか回路的にわかりにくいので、手袋の方はバーグラフモジュール噛ませてよかった。動作感分かる。
- デモ時に軍手ではめる式にすることで、当然手で固定されるので、片手がフリーになったので説明がしやすかった。
などなど、色々と収穫がありました。
そして、ストローアームは以下のサイトを参考にしました!ありがとうございました。
平成16年度 『おもしろ科学教室』 からくりジョイントを作ろう
おわりに

ということで、今回は実は事前に演ってみ溢れそうだったので、まとめ部分をゴッソリ削って臨みまして4分30秒と30秒残して終われました。おかげで、比較的余裕を持って話すことが出来、トップバッターの役目を果たせたかと思います。
それでは、よき KoshianBit & konashi.js & Bluetooth & littleBits Lifeを!